ロドリゲスの公式とクォータニオンによる回転の両方を実装する
クォータニオンには主にハミルトン方式とJPL方式の2つの定義があるが、ハミルトンを採用する。
最初に間違えてクォータニオンによる回転をq⊗rとしていた。qは回転を表すクォータニオン、rは位置ベクトルを表すクォータニオン。正しくはq⊗r⊗q*とすべき(q*は共役クォータニオン)。
ロドリゲスの公式による回転: 回転軸nは単位ベクトル

クォータニオンによる回転: 回転軸nは単位ベクトル


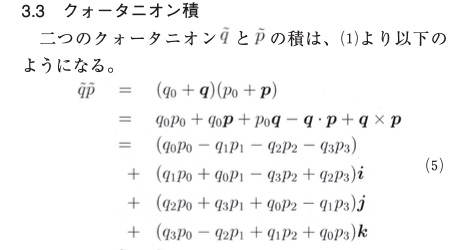
クォータニオンの積
clear; close all; x=1; y=1; z=1; P = [x;y;z]; O = [0;0;0]; vec = [O,P]; plot3(vec(1,:),vec(2,:),vec(3,:),'magenta','LineWidth',3); title('ロドリゲスの公式による回転'); hold on; Xaxis = [1,0,0]'; Yaxis = [0,1,0]'; Zaxis = [0,0,1]'; OX = [O,Xaxis]; OY = [O,Yaxis]; OZ = [O,Zaxis]; plot3(OX(1,:),OX(2,:),OX(3,:),'r'); plot3(OY(1,:),OY(2,:),OY(3,:),'g'); plot3(OZ(1,:),OZ(2,:),OZ(3,:),'b'); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); view(180,0); for theta=linspace(0,2*pi,10) if (theta==0) || (theta==2*pi) continue end a = [0,1,0]'; n = a/norm(a); nx = n(1); ny = n(2); nz = n(3); R = rodriguez(nx,ny,nz,theta); P2 = R*P; vec2 = [O,P2]; plot3(vec2(1,:),vec2(2,:),vec2(3,:),'k--'); big; drawnow; pause(0.3); end figure; plot3(vec(1,:),vec(2,:),vec(3,:),'magenta','LineWidth',3); title('クォータニオンによる回転'); hold on; Xaxis = [1,0,0]'; Yaxis = [0,1,0]'; Zaxis = [0,0,1]'; OX = [O,Xaxis]; OY = [O,Yaxis]; OZ = [O,Zaxis]; plot3(OX(1,:),OX(2,:),OX(3,:),'r'); plot3(OY(1,:),OY(2,:),OY(3,:),'g'); plot3(OZ(1,:),OZ(2,:),OZ(3,:),'b'); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); view(180,0); for theta=linspace(0,2*pi,10) if (theta==0) || (theta==2*pi) continue end a = [0,1,0]'; n = a/norm(a); q = rotate(P,n(1),n(2),n(3),theta); P2 = q(2:4); vec2 = [O,P2]; plot3(vec2(1,:),vec2(2,:),vec2(3,:),'k--'); big; drawnow; pause(0.3); end function R = rodriguez(nx,ny,nz,theta) C = cos(theta); S = sin(theta); R = [nx^2*(1-C)+C nx*ny*(1-C)-nz*S nz*nx*(1-C)+ny*S; nx*ny*(1-C)-nz*S ny^2*(1-C)+C ny*nz*(1-C)-nx*S; nz*nx*(1-C)-ny*S ny*nz*(1-C)+nx*S nz^2*(1-C)+C ]; end function q = rotate(P,nx,ny,nz,theta) x = P(1); y = P(2); z = P(3); q1 = [0,x,y,z]'; q2 = [cos(theta/2),nx*sin(theta/2),ny*sin(theta/2),nz*sin(theta/2)]'; q3 = [cos(theta/2),-nx*sin(theta/2),-ny*sin(theta/2),-nz*sin(theta/2)]'; qdash = MultQuat(q2,q1); q = MultQuat(qdash,q3); end function q = MultQuat(q1,q2) pw = q1(1); px = q1(2); py = q1(3); pz = q1(4); qw = q2(1); qx = q2(2); qy = q2(3); qz = q2(4); q = [pw*qw-px*qx-py*qy-pz*qz; pw*qx+px*qw+py*qz-pz*qy; pw*qy-px*qz+py*qw+pz*qx; pw*qz+px*qy-py*qx+pz*qw]; end

