こんな感じのカルマンフィルタで設計する。
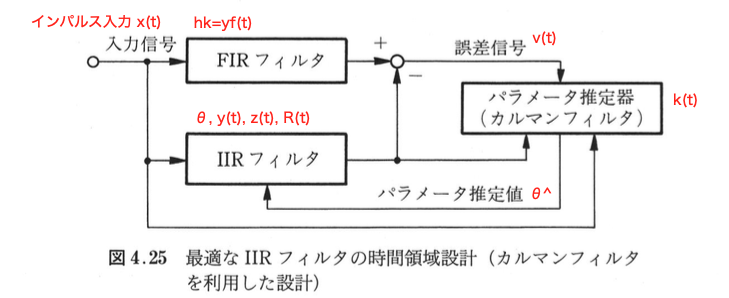
計算したところ、あんまりうまくいかなかった。あとカルマンフィルタでやる必要あるのか?という点がいまいち納得できていない。
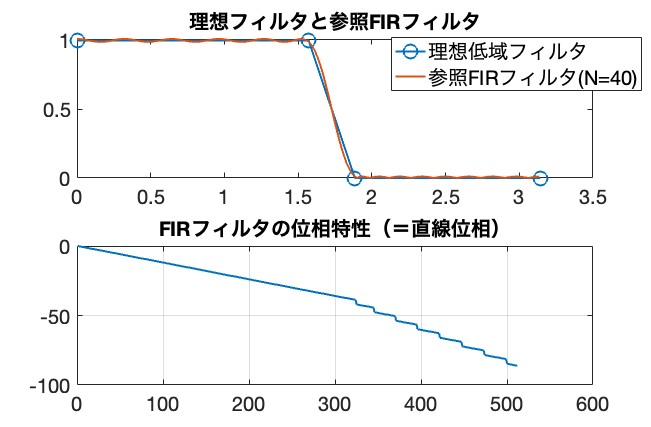
clear; close all; %Parks-McCllelan法による低域FIRフィルタの設計 wc = pi/2; wd = pi/2+pi/10; omega = [0 wc wd pi]; Href = [1 1 0 0]; N = 40; subplot(211); plot(omega, Href,'o-',"DisplayName",'理想低域フィルタ'); hk = firpm(N, omega/max(omega), Href); [h, w] = freqz(hk,1,512); hold on; plot(w,abs(h),'DisplayName','参照FIRフィルタ(N=40)'); title('理想フィルタと参照FIRフィルタ'); legend; subplot(212); plot(smoother(angle(h))); title('FIRフィルタの位相特性(=直線位相)'); big; %FIRフィルタのインパルス応答yf(t)の計算 %入力x(t)をxkとする xk = zeros(N+1,1); xk(1) = 1;%インパルス入力なので %出力yf(t) yk = zeros(size(xk)); %畳み込みでyfkを計算する for t=0:N-1 yf = 0; for k=0:t yf = yf + hk(k+1)*xk(t-k+1); end yk(t+1) = yf; end %上記よりyk=hkが確かめられたので、以降yk=hkとする. yfk = hk; %IIRディジタルフィルタの次数 n = 20; theta = zeros(2*n+1,N);%縦ベクトル z = zeros(2*n+1,N);%縦ベクトル gamma = 1; R = gamma*eye(2*n+1); %N秒間シミュレーションするとする k = zeros(2*n+1,N); v = zeros(1,N);%vは一次元 y = [0];%縦ベクトル rho = 0; for idx = 1:N-1 %誤差vの更新 v(idx+1) = yfk(idx)-z(:,idx)'*theta(:,idx); %ρの更新 rho = rho + 1/idx*(v(idx+1)-rho); %カルマンゲインの更新 k(:,idx+1) = R*z(:,idx)/(1+z(:,idx)'*R*z(:,idx)); %共分散行列の更新 R = (eye(2*n+1)-k(:,idx+1)*z(:,idx)')*R; %パラメータの更新 theta(:,idx+1) = theta(:,idx)+k(:,idx+1)*v(idx+1); %y(t)の更新 y(end+1) = z(:,idx)'*theta(:,idx+1); %z(t)の更新 z_tmp = []; for j=1:n %-y(t-N)の追加 if idx-j<1 z_tmp(end+1) = 0; else z_tmp(end+1) = -y(idx-j); end end for j=0:n %x(t-N)の追加 if idx-j<1 z_tmp(end+1) = 0; else z_tmp(end+1) = xk(idx-j); end end z(:,idx+1) = z_tmp'; end theta_opt = theta(:,end); syms z; a = theta_opt(1:n); b = theta_opt(n+1:end); Ts = 1; num = b; den = [1; a]; G = tf(num', den', Ts); figure(); bode(G); title('IIRフィルタの振幅特性・位相特性'); big; figure(); plot(yk,'DisplayName','Reference FIR (N=40)'); hold on; plot(y,'DisplayName','IIR (N=20)'); legend; title('インパルス応答'); big; function ys=smoother(xs) ys = xs; for idx = 2:length(xs) if (xs(idx) - xs(idx-1)) > 0 disp('curernt value increased!'); ys(idx:end) = ys(idx:end) - abs(xs(idx)-xs(idx-1)); end end end
リファレンスとなるFIRフィルタをParks-McCllellan法で求める。
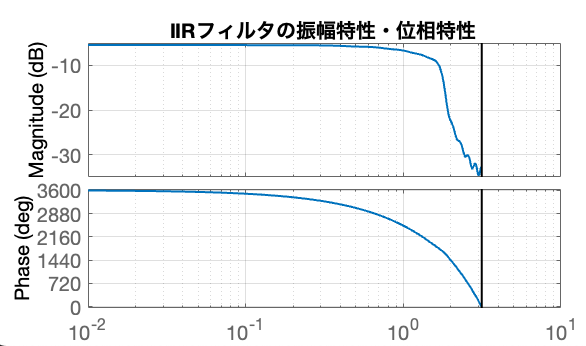
カルマンフィルタで求めたIIRフィルタの位相特性。直線位相になってない。
求めたIIRフィルタのインパルス応答。リファレンスのFIRフィルタにうまく追従していない。
