以下を参考に.
1. Kisabo, Aliyu Bhar, et al. "State-Space Modeling of a Rocket for Optimal Control System Design." Ballistics. IntechOpen, 2019.
2. Cook, Michael V. Flight dynamics principles: a linear systems approach to aircraft stability and control. Butterworth-Heinemann, 2012.




横の運動方程式

これを行列で表すと


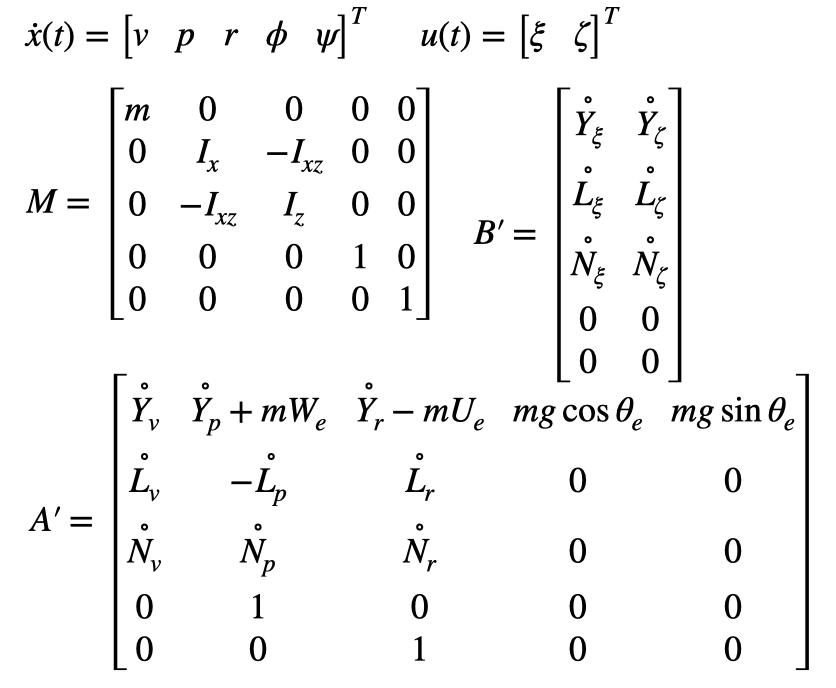
おおもとはこれ。

行列のLatexソース
\dot x(t)=\begin{bmatrix}
v & p & r & \phi & \psi \\
\end{bmatrix}^T
M=\begin{bmatrix}
m & 0 & 0 & 0 & 0 \\
0 & I_x & -I_{xz} & 0 & 0 \\
0 & -I_{xz} & I_z & 0 & 0 \\
0 & 0 & 0 & 1 & 0 \\
0 & 0 & 0 & 0 & 1 \\
\end{bmatrix}
A^{\prime}=\begin{bmatrix}
\overset{\circ}{Y_v} & \overset{\circ}{Y_p}+m W_e & \overset{\circ}{Y_r}-mU_e & mg\cos\theta_e & mg\sin\theta_e \\
\overset{\circ}{L_v} & -\overset{\circ}{L_p} & \overset{\circ}{L_r} & 0 & 0 \\
\overset{\circ}{N_v} & \overset{\circ}{N_p} & \overset{\circ}{N_r} & 0 & 0 \\
0 & 1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 \\
\end{bmatrix}