ロケット工学基礎講義 p.156からの内容
計算アルゴリズム(Backward sweep)は、非線形最適制御(大塚)の数値計算の章(p.142)を参考にした。
座標の定義


加速度(Cは有効排気速度)
終端条件
評価関数


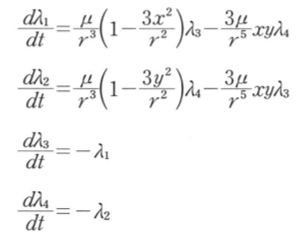
随伴変数の微分方程式
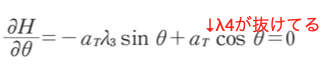
最適制御の必要条件

λ1(t=0), λ2(t=0), λ3(t=0), λ4(t=0), tfの境界条件
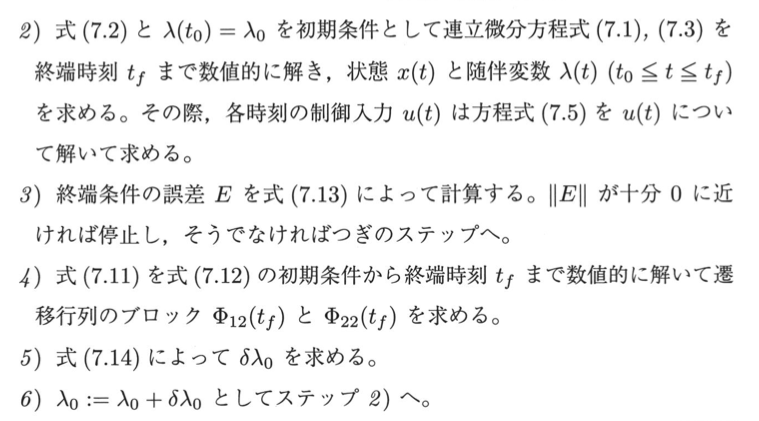
アルゴリズム(Backward sweep)

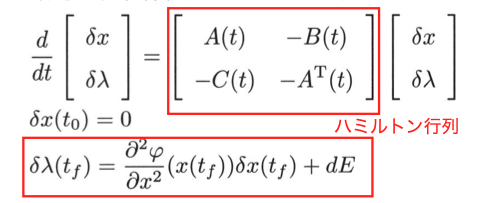
シューティング法の支配方程式(線形2点境界値問題)
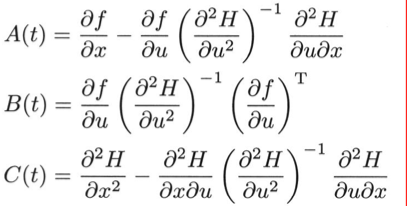
A,B,C行列の定義
終端条件の誤差Eの定義
Sとcに関する方程式

修正量δλの計算
clear; close all; clc; % 計算条件の定義 global C; global tau_m; global mu; rf = 6491.14e3; %m vf = 7832; %m/s vrf = 0; %m/s vy0 = 1e-3; %m/s 垂直方向初速. ゼロにするとエラーになるので微小の値を入れた. vx0 = 465.1; %m/s 水平方向初速. 赤道上、真東への打ち上げ re = 6378.142e3; %m 地球の半径 x0 = 0; y0 = re; C = 4413; %m/s Isp = 450; %s 真空中比推力 tau_m = 320; %s tau_m = m0/beta. betaは推進薬質量流量. m0はロケット初期質量 % aT = T/m 真空中推力加速度 aT_0 = 13.8; %m2/s. 1.4G mu = 3.986e14; %m3/s2 tf = 274.1; %[s] エンジン燃焼時間 div_time = 1000; %時間刻み tspan = linspace(0,tf,div_time); % シューティング法(Backward sweep)による繰り返し計算 % λの初期値変数の初期値を仮定 % l1_0 = 1; l2_0 = 1; l3_0 = 1; l4_0 = 1; l1_0 = 6; l2_0 = 6; l3_0 = 1; l4_0 = -1; % λの初期値変数の定義と初期化 global l1i; global l2i; global l3i; global l4i; l1i = l1_0; l2i = l2_0; l3i = l3_0; l4i = l4_0; % λの修正量δλの定義と初期化 global dl1; global dl2; global dl3; global dl4; dl1 = 0; dl2 = 0; dl3 = 0; dl4 = 0; figure(1); hold on; title('Error curve'); xlabel('Iteration'); ylabel('Error'); iter = 0; Es = []; iters = []; %% メイン計算部 tic; while true %無限ループ % λの初期値を仮定 l1i = l1i + dl1; l2i = l2i + dl2; l3i = l3i + dl3; l4i = l4i + dl4; [t_,xnext] = ode23s(@adjoint_ode, tspan, [x0,y0,vx0,vy0,l1i,l2i,l3i,l4i]); x_ = xnext(:,1); y_ = xnext(:,2); vx_ = xnext(:,3); vy_ = xnext(:,4); l1_ = xnext(:,5); l2_ = xnext(:,6); l3_ = xnext(:,7); l4_ = xnext(:,8); aT_ = C./(tau_m-t_); r_ = sqrt(x_.^2+y_.^2); x_final = x_(end); y_final = y_(end); vx_final = vx_(end); vy_final = vy_(end); l1_final = l1_(end); l2_final = l2_(end); l3_final = l3_(end); l4_final = l4_(end); aT_final = aT_(end); r_final = r_(end); syms x y vx vy l1 l2 l3 l4 aT; f1 = vx; f2 = vy; f3 = aT*sqrt(vx^2/(vx^2+vy^2))-mu/sqrt(x^2+y^2)^3*x; f4 = aT*sqrt(vy^2/(vx^2+vy^2))-mu/sqrt(x^2+y^2)^3*y; H = 1 + l1*f1 + l2*f2 + l3*f3 + l4*f4; % 状態方程式fのヤコビ行列の計算 df1_dx = diff(f1,x); df1_dy = diff(f1,y); df1_dvx = diff(f1,vx); df1_dvy = diff(f1,vy); df2_dx = diff(f2,x); df2_dy = diff(f2,y); df2_dvx = diff(f2,vx); df2_dvy = diff(f2,vy); df3_dx = diff(f3,x); df3_dy = diff(f3,y); df3_dvx = diff(f3,vx); df3_dvy = diff(f3,vy); df4_dx = diff(f4,x); df4_dy = diff(f4,y); df4_dvx = diff(f4,vx); df4_dvy = diff(f4,vy); df_dx = [df1_dx df1_dy df1_dvx df1_dvy; df2_dx df2_dy df1_dvx df2_dvy; df3_dx df3_dy df3_dvx df3_dvy; df4_dx df4_dy df4_dvx df4_dvy]; % Hのヘッセ行列の計算 d2H_dxdx = diff(diff(H,x),x); d2H_dxdy = diff(diff(H,x),y); d2H_dxdvx = diff(diff(H,x),vx); d2H_dxdvy = diff(diff(H,x),vy); d2H_dydx = diff(diff(H,y),x); d2H_dydy = diff(diff(H,y),y); d2H_dydvx = diff(diff(H,y),vx); d2H_dydvy = diff(diff(H,y),vy); d2H_dvxdx = diff(diff(H,vx),x); d2H_dvxdy = diff(diff(H,vx),y); d2H_dvxdvx = diff(diff(H,vx),vx); d2H_dvxdvy = diff(diff(H,vx),vy); d2H_dvydx = diff(diff(H,vy),x); d2H_dvydy = diff(diff(H,vy),y); d2H_dvydvx = diff(diff(H,vy),vx); d2H_dvydvy = diff(diff(H,vy),vy); d2H_dx2 = [d2H_dxdx d2H_dxdy d2H_dxdvx d2H_dxdvy; d2H_dydx d2H_dydy d2H_dydvx d2H_dydvy; d2H_dvxdx d2H_dvxdy d2H_dvxdvx d2H_dvxdvy; d2H_dvydx d2H_dvydy d2H_dvydvx d2H_dvydvy]; A_sym = df_dx; B_sym = 0; C_sym = d2H_dx2; r = sqrt(x^2+y^2); cos_theta = vx/sqrt(vx^2+vy^2); sin_theta = vy/sqrt(vx^2+vy^2); dtheta_dt = cos_theta^2*(-vy/vx^2*(aT*cos_theta-mu/r^3*x)+... 1/vx*(aT*sin_theta-mu/r^3*y)); dr_dt = x/sqrt(x^2+y^2)*vx + y/sqrt(x^2+y^2)*vy; phi1 = r - rf; phi2 = r*dtheta_dt - vf; phi3 = dr_dt - vrf; phi = phi1+phi2+phi3; % Terminal cost: scalar function d2phi_dxdx = diff(diff(phi,x),x); d2phi_dxdy = diff(diff(phi,x),y); d2phi_dxdvx = diff(diff(phi,x),vx); d2phi_dxdvy = diff(diff(phi,x),vy); d2phi_dydx = diff(diff(phi,y),x); d2phi_dydy = diff(diff(phi,y),y); d2phi_dydvx = diff(diff(phi,y),vx); d2phi_dydvy = diff(diff(phi,y),vy); d2phi_dvxdx = diff(diff(phi,vx),x); d2phi_dvxdy = diff(diff(phi,vx),y); d2phi_dvxdvx = diff(diff(phi,vx),vx); d2phi_dvxdvy = diff(diff(phi,vx),vy); d2phi_dvydx = diff(diff(phi,vy),x); d2phi_dvydy = diff(diff(phi,vy),y); d2phi_dvydvx = diff(diff(phi,vy),vx); d2phi_dvydvy = diff(diff(phi,vy),vy); S = [d2phi_dxdx d2phi_dxdy d2phi_dxdvx d2phi_dxdvy; d2phi_dydx d2phi_dydy d2phi_dydvx d2phi_dydvy; d2phi_dvxdx d2phi_dvxdy d2phi_dvxdvx d2phi_dvxdvy; d2phi_dvydx d2phi_dvydy d2phi_dvydvx d2phi_dvydvy]; S_final = eval(subs(S,[x,y,vx,vy,aT],[x_final,y_final,vx_final,vy_final,aT_final])); % ターミナルコストΦ(終端条件)のグラディエントの計算 dphi_dx = [diff(phi,x); diff(phi,y); diff(phi,vx); diff(phi,vy)]; dphi_dx_transpose_final = eval(subs((dphi_dx)',[x,y,vx,vy,aT],... [x_final,y_final,vx_final,vy_final,aT_final])); % エラーの計算 E = [l1_final;l2_final;l3_final;l4_final] -... dphi_dx_transpose_final * [x_final;y_final;vx_final;vy_final]; error = max(abs(E)); rf_error = abs(r_final - rf); vrf_error = abs(... eval(subs((r*dtheta_dt),[x,y,vx,vy,aT],... [x_final,y_final,vx_final,vy_final,aT_final])) - vf); vr_error = abs(eval(subs(dr_dt,[x,y,vx,vy],... [x_final,y_final,vx_final,vy_final])) - vrf); fprintf('Loop: %d, Error: %.3f, Rf_error: %.2f[km], Vrf_error: %.2f[m/s], Vr_error: %.2f[m/s] \n',... iter,error,rf_error/1000,vrf_error/1000,vr_error/1000); figure(1); iters(end+1) = iter; Es(end+1) = error; plot(iters,Es,'k'); set(gca, 'YScale', 'log'); drawnow(); if rf_error < 10e3 disp('Simulation end'); break; end if error < 0.001 disp('Simulation end'); break; end %初回に一度make_ABCを実行してAt,Bt,Ctを作成しておく. % [At,Bt,Ct] = make_ABC(A_sym,B_sym,C_sym,t_,x_,y_,vx_,vy_,aT_,l1_,l2_,l3_,l4_); % save('ABC.mat','At','Bt','Ct'); %2回目以降はAt,Bt,Ctを呼び出して使う load('ABC','At','Bt','Ct'); [t,Sprev] = ode23s(@(t,Snext) riccati_ode1(t,Snext,At,Bt,Ct,t_),flip(tspan),S_final); c_final = -E; [t,cprev] = ode23s(@(t,cnext) riccati_ode2(t,cnext,At,Bt,Ct,Sprev,t_),flip(tspan),c_final); % tは時系列的に逆順に入っているので、cprevの最後の要素がc(0)になる。 c_zero = cprev(end,:); dl1 = c_zero(1); dl2 = c_zero(2); dl3 = c_zero(3); dl4 = c_zero(4); iter = iter + 1; end toc; subplot(221); plot(x_/1000,y_/1000); title('赤道面上での軌跡'); xlabel('水平位置 x [km]') ylabel('垂直距離 y [km]'); subplot(222); % 地表からの高度 h_ = (r_ - re); %m plot(t_,h_/1000); title('高度'); xlabel('Time [s]'); ylabel('高度 h [km]'); subplot(223); % x軸から測った機軸姿勢角θ theta_ = atan2(vy_,vx_); plot(t_,theta_/pi*180); title('推力軸姿勢角θ'); xlabel('Time [s]'); ylabel('θ [deg]'); % 飛行レンジ角Φ phi_ = atan2(x_,y_); % 局所水平面から測った機軸姿勢角θL theta_L_ = theta_ + phi_; subplot(224); plot(t_,theta_L_/pi*180); title('局所水平面に対する機軸姿勢角θL'); xlabel('Time [s]'); ylabel('θL [deg]'); big; grid; function dc = riccati_ode2(t,c,At,Bt,Ct,St,t_all) N = length(t_all); St = reshape(St, [4,4,N]); [val,t_idx]=min(abs(t_all-t)); A_t = At(:,:,t_idx); B_t = Bt(:,:,t_idx); C_t = Ct(:,:,t_idx); S_t = St(:,:,t_idx); dc = (S_t*B_t-A_t')*c; end function [At, Bt, Ct] = make_ABC(A_sym,B_sym,C_sym,t_all,x_,y_,vx_,vy_,aT_,l1_,l2_,l3_,l4_) tic; syms x y vx vy aT l1 l2 l3 l4; N = length(t_all); At = zeros(4,4,N); Bt = zeros(4,4,N); Ct = zeros(4,4,N); for t_idx=1:length(t_all) t_idx x_t = x_(t_idx); y_t = y_(t_idx); vx_t = vx_(t_idx); vy_t = vy_(t_idx); aT_t = aT_(t_idx); l1_t = l1_(t_idx); l2_t = l2_(t_idx); l3_t = l3_(t_idx); l4_t = l4_(t_idx); A = eval(subs(A_sym,[x y vx vy aT],[x_t,y_t,vx_t,vy_t,aT_t])); B = B_sym; C = eval(subs(C_sym,[x y vx vy l1 l2 l3 l4 aT],... [x_t,y_t,vx_t,vy_t,l1_t,l2_t,l3_t,l4_t,aT_t])); At(:,:,t_idx) = A; Bt(:,:,t_idx) = B; Ct(:,:,t_idx) = C; end toc; end function dS = riccati_ode1(t,S,At,Bt,Ct,t_all) S = reshape(S,[4,4]); [val,t_idx]=min(abs(t_all-t)); A_t = At(:,:,t_idx); B_t = Bt(:,:,t_idx); C_t = Ct(:,:,t_idx); dS = -A_t'*S-S*A_t-S*B_t*S+C_t; dS = dS(:); end function dx = adjoint_ode(t,xprev) global C; global tau_m; global mu; x = xprev(1); y = xprev(2); vx = xprev(3); vy = xprev(4); l1 = xprev(5); l2 = xprev(6); l3 = xprev(7); l4 = xprev(8); r = sqrt(x^2+y^2); aT = C/(tau_m-t); cos_th = l3/sqrt(l3^2+l4^2); sin_th = l4/sqrt(l3^2+l4^2); dx = [vx; vy; aT*cos_th-mu/r^3*x; aT*sin_th-mu/r^3*y; mu/r^3*(1-3*x^2/r^2)*l3-3*mu/r^5*x*y*l4; mu/r^3*(1-3*y^2/r^2)*l4-3*mu/r^5*x*y*l3; -l1; -l2]; end
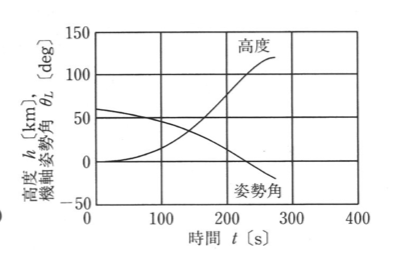
実行結果
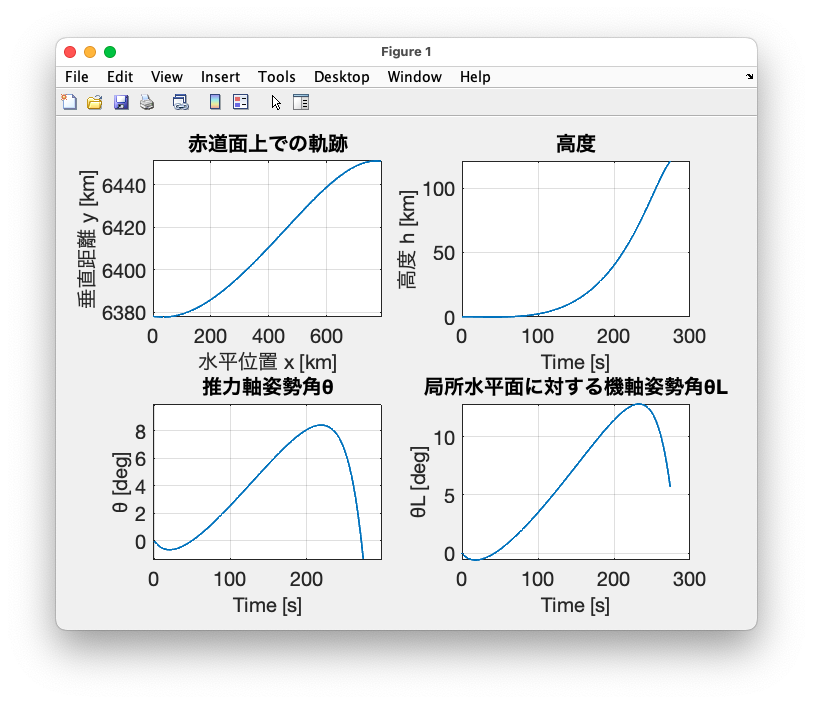
書籍に挙げられていたグラフと比較すると、姿勢角が正しく計算されていない
計算をすすめるとエラー(=E)は減少するが、なぜか終端条件(t=tfでの位置と速度)のエラーは逆に増加を始める。したがって、|r-rf|<10kmとなるところで計算を打ち切った。原因を想像するに、ステージコストの評価がターミナルコストに優先されてしまっているということだろうか(Eはステージコストとターミナルコストの評価の合計値の誤差である)。
追記:上記ではA,B,Cの計算を最初の一度しか行っていないが、その都度実行する必要があることに気づいた。ただA,B,Cを逐次計算するように変更すると計算が収束しなくなった(エラーが増え続ける)。怪しいのはθをvx,vyで表している部分か(正の根号しかとっていない)。