(23)式を使えば、クォータニオンq1からクォータニオンq2への補間位置が逐次的に求められる。

このテクニックは「実践ロボット制御」でも単位クォータニオンを用いた大円補間として紹介されていた。

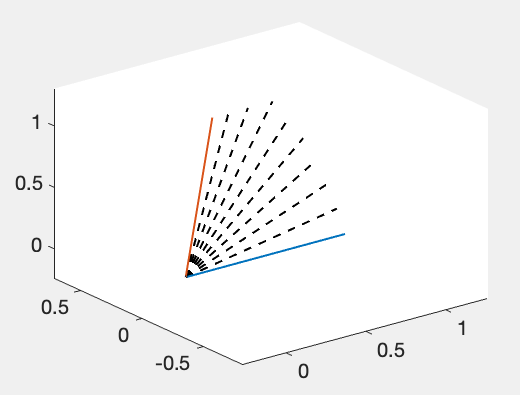
clear; close all; origin = [1,0,0]'; destination = [1,1,1]'; q1 = [0,origin(1),origin(2),origin(3)]'; q2 = [0,destination(1),destination(2),destination(3)]'; phi = acos(dot(q1,q2)/(norm(q1)*norm(q2))); plot3([0,q1(2)],[0,q1(3)],[0,q1(4)]); hold on; plot3([0,q2(2)],[0,q2(3)],[0,q2(4)]); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); for t=linspace(0,1,10) if(t==0)||(t==1) continue end tmp = sin((1-t)*phi)/sin(phi)*q1+sin(t*phi)/sin(phi)*q2; px = tmp(2); py = tmp(3); pz = tmp(4); plot3([0,px],[0,py],[0,pz],'k--'); big; drawnow; pause(0.3); end