https://sfepy.org/doc-devel/tutorial.html
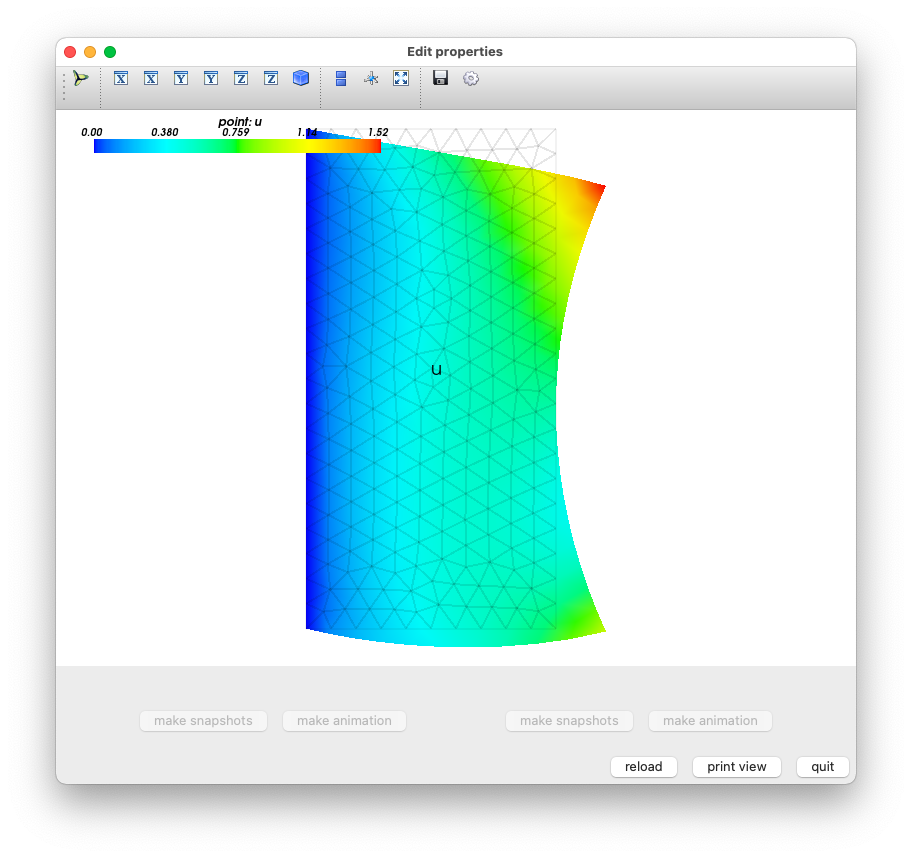
#!/usr/bin/env python from __future__ import print_function from __future__ import absolute_import from argparse import ArgumentParser import numpy as nm import sys sys.path.append('.') from sfepy.base.base import IndexedStruct from sfepy.discrete import (FieldVariable, Material, Integral, Function, Equation, Equations, Problem) from sfepy.discrete.fem import Mesh, FEDomain, Field from sfepy.terms import Term from sfepy.discrete.conditions import Conditions, EssentialBC from sfepy.solvers.ls import ScipyDirect from sfepy.solvers.nls import Newton from sfepy.postprocess.viewer import Viewer from sfepy.mechanics.matcoefs import stiffness_from_lame def shift_u_fun(ts, coors, bc=None, problem=None, shift=0.0): """ Define a displacement depending on the y coordinate. """ val = shift * coors[:,1]**2 return val def main(): from sfepy import data_dir mesh = Mesh.from_file(data_dir + '/meshes/2d/rectangle_tri.mesh') domain = FEDomain('domain', mesh) min_x, max_x = domain.get_mesh_bounding_box()[:,0] eps = 1e-8 * (max_x - min_x) omega = domain.create_region('Omega', 'all') gamma1 = domain.create_region('Gamma1', 'vertices in x < %.10f' % (min_x + eps), 'facet') gamma2 = domain.create_region('Gamma2', 'vertices in x > %.10f' % (max_x - eps), 'facet') field = Field.from_args('fu', nm.float64, 'vector', omega, approx_order=2) u = FieldVariable('u', 'unknown', field) v = FieldVariable('v', 'test', field, primary_var_name='u') m = Material('m', D=stiffness_from_lame(dim=2, lam=1.0, mu=1.0)) f = Material('f', val=[[0.02], [0.01]]) integral = Integral('i', order=3) t1 = Term.new('dw_lin_elastic(m.D, v, u)', integral, omega, m=m, v=v, u=u) t2 = Term.new('dw_volume_lvf(f.val, v)', integral, omega, f=f, v=v) eq = Equation('balance', t1 + t2) eqs = Equations([eq]) fix_u = EssentialBC('fix_u', gamma1, {'u.all' : 0.0}) bc_fun = Function('shift_u_fun', shift_u_fun, extra_args={'shift' : 0.01}) shift_u = EssentialBC('shift_u', gamma2, {'u.0' : bc_fun}) ls = ScipyDirect({}) nls_status = IndexedStruct() nls = Newton({}, lin_solver=ls, status=nls_status) pb = Problem('elasticity', equations=eqs) pb.save_regions_as_groups('regions') pb.set_bcs(ebcs=Conditions([fix_u, shift_u])) pb.set_solver(nls) status = IndexedStruct() state = pb.solve(status=status) print('Nonlinear solver status:\n', nls_status) print('Stationary solver status:\n', status) pb.save_state('linear_elasticity.vtk', state) view = Viewer('linear_elasticity.vtk') view(vector_mode='warp_norm', rel_scaling=2, is_scalar_bar=True, is_wireframe=True) if __name__ == '__main__': main()