調べた感じ、すぐに使えるBotはないみたいだった。
discord.pyでBotを作成し、メッセージをカウントするたびに誰がコメントしたかをデータベースに残していくのが一番簡単な実装みたい。
AutowareをDockerでインストールする
rocker --nvidia --x11 --user --volume $HOME/autoware_map -- ghcr.io/autowarefoundation/autoware-universe:humble-latest-prebuilt
上記でエラーが出たので以下を実行する
could not select device driver "" with capabilities: [[gpu]]. - #5 by sk.ahmed401 - Docker and NVIDIA Docker - NVIDIA Developer Forums
“Permission Denied While Trying to Connect to the Docker Daemon Socket” Error | Baeldung on Linux
sudo chmod 666 /var/run/docker.sock sudo apt install -y nvidia-docker2 sudo systemctl daemon-reload sudo systemctl restart docker
rocker --nvidia --x11 --user --volume $HOME/autoware --volume $HOME/autoware_map -- ghcr.io/autowarefoundation/autoware-universe:latest-cuda
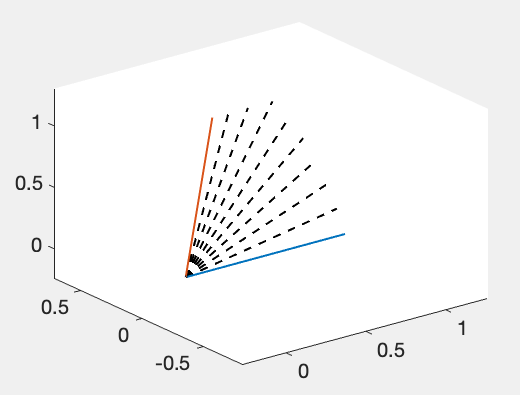
SLERP(球面線形補間:クォータニオンによる大円補間)による補間
(23)式を使えば、クォータニオンq1からクォータニオンq2への補間位置が逐次的に求められる。

このテクニックは「実践ロボット制御」でも単位クォータニオンを用いた大円補間として紹介されていた。

clear; close all; origin = [1,0,0]'; destination = [1,1,1]'; q1 = [0,origin(1),origin(2),origin(3)]'; q2 = [0,destination(1),destination(2),destination(3)]'; phi = acos(dot(q1,q2)/(norm(q1)*norm(q2))); plot3([0,q1(2)],[0,q1(3)],[0,q1(4)]); hold on; plot3([0,q2(2)],[0,q2(3)],[0,q2(4)]); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); for t=linspace(0,1,10) if(t==0)||(t==1) continue end tmp = sin((1-t)*phi)/sin(phi)*q1+sin(t*phi)/sin(phi)*q2; px = tmp(2); py = tmp(3); pz = tmp(4); plot3([0,px],[0,py],[0,pz],'k--'); big; drawnow; pause(0.3); end
クォータニオンによる回転演算子の意味
クォータニオンによる回転ではq⊗r⊗q*で回転を表現する。
qを回転行列Rのようにとらえれば、位置ベクトルの「前に」qを置くのは自然に思える。
ところで、なぜ回転を表すqとその共役q*で挟み込むのか、というのが納得できていない。
クォータニオンの積q⊗r⊗q*では、
ステップ1:tmp = q⊗r
という計算に続いて、
ステップ2:tmp⊗q*
という演算が行われている。
ステップ1の計算でオーバーランした分をステップ2で戻しているのかと思い、以下のコードで調べてみた。
clear; close all; x=1; y=1; z=1; P = [x;y;z]; O = [0;0;0]; vec = [O,P]; plot3(vec(1,:),vec(2,:),vec(3,:),'magenta','LineWidth',3); hold on; Xaxis = [1,0,0]'; Yaxis = [0,1,0]'; Zaxis = [0,0,1]'; OX = [O,Xaxis]; OY = [O,Yaxis]; OZ = [O,Zaxis]; plot3(OX(1,:),OX(2,:),OX(3,:),'r'); plot3(OY(1,:),OY(2,:),OY(3,:),'g'); plot3(OZ(1,:),OZ(2,:),OZ(3,:),'b'); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); view(180,0); for theta=linspace(0,2*pi*2,10) if (theta==0) || (theta==4*pi) continue end a = [0,1,0]'; n = a/norm(a); x = P(1); y = P(2); z = P(3); nx = n(1); ny = n(2); nz = n(3); q1 = [0,x,y,z]'; q2 = [cos(theta/2),nx*sin(theta/2),ny*sin(theta/2),nz*sin(theta/2)]'; q3 = [cos(theta/2),-nx*sin(theta/2),-ny*sin(theta/2),-nz*sin(theta/2)]'; q_tmp = MultQuat(q2,q1); P2_tmp = q_tmp(2:4); vec2_tmp = [O,P2_tmp]; plot3(vec2_tmp(1,:),vec2_tmp(2,:),vec2_tmp(3,:),'b--'); big; drawnow; pause(0.3); q = MultQuat(q_tmp,q3); P2 = q(2:4); vec2 = [O,P2]; plot3(vec2(1,:),vec2(2,:),vec2(3,:),'k--'); big; drawnow; pause(0.3); end function q = MultQuat(q1,q2) pw = q1(1); px = q1(2); py = q1(3); pz = q1(4); qw = q2(1); qx = q2(2); qy = q2(3); qz = q2(4); q = [pw*qw-px*qx-py*qy-pz*qz; pw*qx+px*qw+py*qz-pz*qy; pw*qy-px*qz+py*qw+pz*qx; pw*qz+px*qy-py*qx+pz*qw]; end
青がステップ1の計算結果、黒がステップ2の計算結果である。
回転軸に垂直な平面でみると黒が青をカバーする事がわかる。

実際には黒と青は一致しているわけではなく、青線は3次元的に配置されている。
カンでは
青線(ステップ1の計算結果)がどういう物理的な意味を持っているのか、調べる必要がある。

ロドリゲスの公式による回転とクォータニオンによる回転
ロドリゲスの公式とクォータニオンによる回転の両方を実装する
クォータニオンには主にハミルトン方式とJPL方式の2つの定義があるが、ハミルトンを採用する。
最初に間違えてクォータニオンによる回転をq⊗rとしていた。qは回転を表すクォータニオン、rは位置ベクトルを表すクォータニオン。正しくはq⊗r⊗q*とすべき(q*は共役クォータニオン)。
ロドリゲスの公式による回転: 回転軸nは単位ベクトル

クォータニオンによる回転: 回転軸nは単位ベクトル


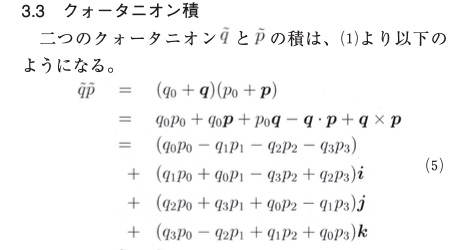
クォータニオンの積
clear; close all; x=1; y=1; z=1; P = [x;y;z]; O = [0;0;0]; vec = [O,P]; plot3(vec(1,:),vec(2,:),vec(3,:),'magenta','LineWidth',3); title('ロドリゲスの公式による回転'); hold on; Xaxis = [1,0,0]'; Yaxis = [0,1,0]'; Zaxis = [0,0,1]'; OX = [O,Xaxis]; OY = [O,Yaxis]; OZ = [O,Zaxis]; plot3(OX(1,:),OX(2,:),OX(3,:),'r'); plot3(OY(1,:),OY(2,:),OY(3,:),'g'); plot3(OZ(1,:),OZ(2,:),OZ(3,:),'b'); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); view(180,0); for theta=linspace(0,2*pi,10) if (theta==0) || (theta==2*pi) continue end a = [0,1,0]'; n = a/norm(a); nx = n(1); ny = n(2); nz = n(3); R = rodriguez(nx,ny,nz,theta); P2 = R*P; vec2 = [O,P2]; plot3(vec2(1,:),vec2(2,:),vec2(3,:),'k--'); big; drawnow; pause(0.3); end figure; plot3(vec(1,:),vec(2,:),vec(3,:),'magenta','LineWidth',3); title('クォータニオンによる回転'); hold on; Xaxis = [1,0,0]'; Yaxis = [0,1,0]'; Zaxis = [0,0,1]'; OX = [O,Xaxis]; OY = [O,Yaxis]; OZ = [O,Zaxis]; plot3(OX(1,:),OX(2,:),OX(3,:),'r'); plot3(OY(1,:),OY(2,:),OY(3,:),'g'); plot3(OZ(1,:),OZ(2,:),OZ(3,:),'b'); xlim([-2,2]); ylim([-2,2]); zlim([-2,2]); view(180,0); for theta=linspace(0,2*pi,10) if (theta==0) || (theta==2*pi) continue end a = [0,1,0]'; n = a/norm(a); q = rotate(P,n(1),n(2),n(3),theta); P2 = q(2:4); vec2 = [O,P2]; plot3(vec2(1,:),vec2(2,:),vec2(3,:),'k--'); big; drawnow; pause(0.3); end function R = rodriguez(nx,ny,nz,theta) C = cos(theta); S = sin(theta); R = [nx^2*(1-C)+C nx*ny*(1-C)-nz*S nz*nx*(1-C)+ny*S; nx*ny*(1-C)-nz*S ny^2*(1-C)+C ny*nz*(1-C)-nx*S; nz*nx*(1-C)-ny*S ny*nz*(1-C)+nx*S nz^2*(1-C)+C ]; end function q = rotate(P,nx,ny,nz,theta) x = P(1); y = P(2); z = P(3); q1 = [0,x,y,z]'; q2 = [cos(theta/2),nx*sin(theta/2),ny*sin(theta/2),nz*sin(theta/2)]'; q3 = [cos(theta/2),-nx*sin(theta/2),-ny*sin(theta/2),-nz*sin(theta/2)]'; qdash = MultQuat(q2,q1); q = MultQuat(qdash,q3); end function q = MultQuat(q1,q2) pw = q1(1); px = q1(2); py = q1(3); pz = q1(4); qw = q2(1); qx = q2(2); qy = q2(3); qz = q2(4); q = [pw*qw-px*qx-py*qy-pz*qz; pw*qx+px*qw+py*qz-pz*qy; pw*qy-px*qz+py*qw+pz*qx; pw*qz+px*qy-py*qx+pz*qw]; end


Android上で動画をストリーミングしてPCで受信する
LAN経由(AndroidのIP)で動画にアクセスしたい。
Android上でmjpg_streamerを動かすイメージ。
このあたりが参考になりそう
github.com
github.com