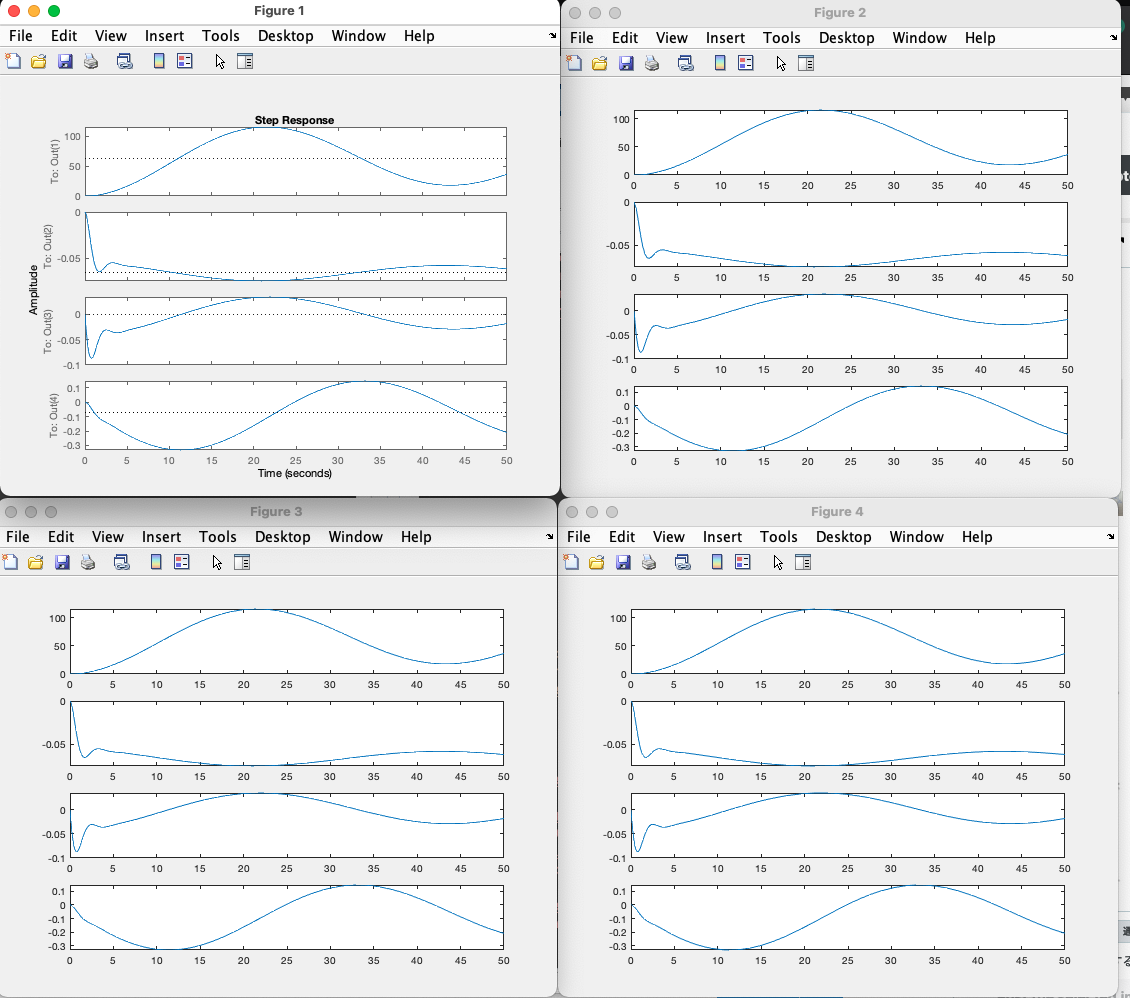
clear; close all; g=32.174;%ヤード・ポンド法なので9.8ではない Za=-236; Zu=-0.227; Xa=14.7; Xu=-0.0215; Madot=-0.28; Ma=-3.78; Mu=0; Mq=-0.992; Zde=-12.9; Mde=-2.48; U0=293.8; Zq=-5.76; global A; global B; A=[Xu Xa 0 -g; Zu/U0,Za/U0 (U0+Zq)/U0 0; Mu+Madot*Zu/U0 Ma+Madot*Za/U0 Mq+Madot*(U0+Zq)/U0 0; 0 0 1 0]; B=[0; Zde/U0; Mde+Madot*Zde/U0; 0]; C=[1 0 0 0; 0 1 0 0; 0 0 1 0 ; 0 0 0 1]; D=[0;0;0;0]; sys=ss(A,B,C,D); opts = stepDataOptions('InputOffset',0,'StepAmplitude',0.1); %step()を用いた時間応答 step(sys,opts); xlim([0,50]); %lsim()を用いた時間応答 N=200; ts=linspace(0,50,N); us=0.1*ones(N,1); y=lsim(sys,us,ts); figure(); subplot(411); plot(ts,y(:,1)); subplot(412); plot(ts,y(:,2)); subplot(413); plot(ts,y(:,3)); subplot(414); plot(ts,y(:,4)); %ode45を用いた時間応答 x0=[0 0 0 0 ]'; tspan=[0 50]; [t,x]=ode45(@dynamical_system,tspan,x0); figure(); subplot(411); plot(t,x(:,1)); subplot(412); plot(t,x(:,2)); subplot(413); plot(t,x(:,3)); subplot(414); plot(t,x(:,4)); %ode23s()を用いた時間応答 [t,x]=ode23s(@dynamical_system,tspan,x0); figure(); subplot(411); plot(t,x(:,1)); subplot(412); plot(t,x(:,2)); subplot(413); plot(t,x(:,3)); subplot(414); plot(t,x(:,4)); function dx = dynamical_system(t,x) % x = [u;α;q;θ; β;p;r;φ;ψ] global A; global B; delta_e=0.1; dx = A*x+B*delta_e; end
4つの方法による計算は一致する