testbot.urdf
<?xml version="1.0" ?> <robot name="testbot"> <material name="black"> <color rgba="0.0 0.0 0.0 1.0"/> </material> <material name="orange"> <color rgba="1.0 0.4 0.0 1.0"/> </material> <link name="base"/> <joint name="fixed" type="fixed"> <parent link="base"/> <child link="link1"/> </joint> <link name="link1"> <collision> <origin xyz="0 0 0.25" rpy="0 0 0"/> <geometry> <box size="0.1 0.1 0.5"/> </geometry> </collision> <visual> <origin xyz="0 0 0.25" rpy="0 0 0"/> <geometry> <box size="0.1 0.1 0.5"/> </geometry> <material name="black"/> </visual> <inertial> <origin xyz="0 0 0.25" rpy="0 0 0"/> <mass value="1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0" /> </inertial> </link> <joint name="joint1" type="revolute"> <parent link="link1"/> <child link="link2"/> <origin xyz="0 0 0.5" rpy="0 0 0"/> <axis xyz="0 0 1"/> <limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/> </joint> <link name="link2"> <collision> <origin xyz="0 0 0.25" rpy="0 0 0"/> <geometry> <box size="0.1 0.1 0.5"/> </geometry> </collision> <visual> <origin xyz="0 0 0.25" rpy="0 0 0" /> <geometry> <box size="0.1 0.1 0.5" /> </geometry> <material name="orange" /> </visual> <inertial> <origin xyz="0 0 0.25" rpy="0 0 0"/> <mass value="1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0" /> </inertial> </link> <joint name="joint2" type="revolute"> <parent link="link2"/> <child link="link3" /> <origin xyz="0 0 0.5" rpy="0 0 0"/> <axis xyz="0 1 0"/> <limit effort="30" lower="-2.617" upper="2.617" velocity="1.571" /> </joint> <link name="link3"> <collision> <origin xyz="0 0 0.5" rpy="0 0 0" /> <geometry> <box size="0.1 0.1 1" /> </geometry> </collision> <visual> <origin xyz="0 0 0.5" rpy="0 0 0" /> <geometry> <box size="0.1 0.1 1" /> </geometry> <material name="black" /> </visual> <inertial> <origin xyz="0 0 0.5" rpy="0 0 0" /> <mass value="1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="0.0" iyz="0.0" izz="1.0" /> </inertial> </link> <joint name="joint3" type="revolute"> <parent link="link3"/> <child link="link4"/> <origin xyz="0 0 1.0" rpy="0 0 0"/> <axis xyz="0 1 0"/> <limit effort="30" lower="-2.617" upper="2.617" velocity="1.571" /> </joint> <link name="link4"> <collision> <origin xyz="0 0 0.25" rpy="0 0 0" /> <geometry> <box size="0.1 0.1 0.5" /> </geometry> </collision> <visual> <origin xyz="0 0 0.25" rpy="0 0 0" /> <geometry> <box size="0.1 0.1 0.5" /> </geometry> <material name="orange" /> </visual> <inertial> <origin xyz="0 0 0.25" rpy="0 0 0" /> <mass value="1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0" /> </inertial> </link> </robot>
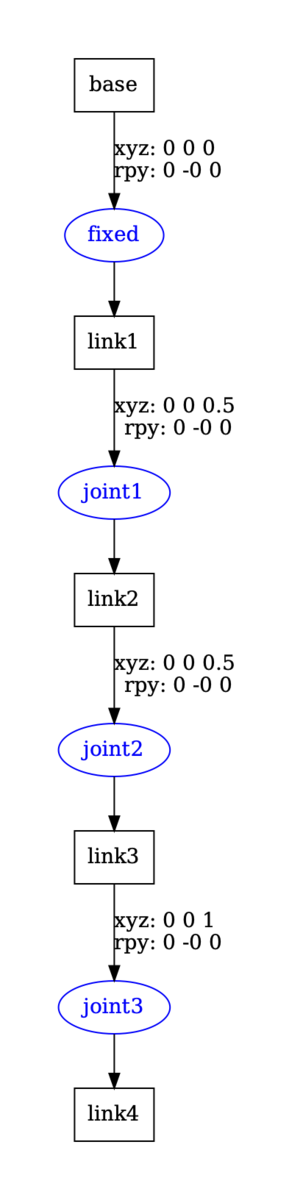
$ urdf_to_graphiz testbot.urdf
launch/testbot.launch
<launch> <arg name="model" default="$(find testbot_description)/urdf/testbot.urdf" /> <arg name="gui" default="True" /> <param name="robot_description" textfile="$(arg model)" /> <param name="use_gui" value="$(arg gui)"/> <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /> </launch>
起動
$ roslaunch testbot_description testbot.launch
$ rviz

GitHubレポジトリに上がっていた
github.com
上のGitHubをそのまま実行すると以下のエラーがでるので、testbot.launch内のstate_publisherをrobot_state_publisherに変更する
ERROR: cannot launch node of type [robot_state_publisher/state_publisher]: Cannot locate node of type [state_publisher] in package [robot_state_publisher]. Make sure file exists in package path and permission is set to executable (chmod +x)